
Questa pagina é dedicata a descrivere la progettazione e costruzione della mia versione di Wheatley, personaggio fondamentale preso dal videogioco Portal 2. Qualche anno fa avevo giá costruito un Wheatley meccanico, utilizzando vari materiali che avevo giá a disposizione, oltre che alla termoplastica Worbla, molto comune nel mondo cosplay.
Il risultato, nonostante fosse perfettamente funzionante, era decisamente tutt’altro che ottimale, ed esteticamente discutibile. Perció, ora che ho a mia disposizione una stampante 3D, ho deciso di ripartire con un nuovo modello, cambiandone i meccanismi e aggiungendo funzionalità.
Qui voglio raccogliere tutte le informazioni utili per riprodurre ció che ho costruito, sia per chi fosse interessato, sia per me, nel caso (altamente probabile) in cui dovessi dimenticarmi qualcosa nel momento in cui, inevitabilmente, qualcosa andrà storto, e dovró ricostruire Wheatley tutto o in parte.
Estetica di Wheatley
Per la parte puramente estetica di Wheatley, ho utilizzato questo modello preso da Thingiverse:
https://www.thingiverse.com/thing:2868266
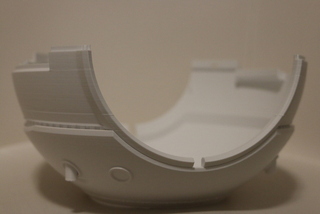
Questo modello è stato progettato con l’idea di muoverlo “a mano”, senza componenti elettroniche, per questo ho eliminato alcune parti non necessarie, per fare spazio alle varie componenti interne, e ho ridisegnato alcuni pezzi, in particolare le palpebre, per renderle compatibili con i meccanismi che ho progettato.
Ho riscalato l’intero modello del 350%, in modo da ottenere la dimensione maggiore possibile che mi permettesse di poter stampare il tutto senza dover dividere in più pezzi i componenti più grandi (il volume di stampa della BambuLab A1 è di 250x250x250). Questa dimensione si è rivelata perfetta per mantenere un buon bilanciamento tra estetica e funzionalità.



Progettazione meccanica
Ora viene la parte interessante: il funzionamento interno di Wheatley.
https://www.youtube.com/watch?v=OEn9hZ-Tw1E
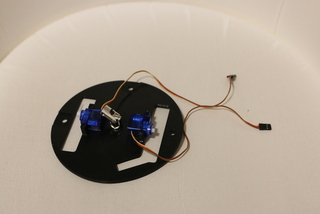
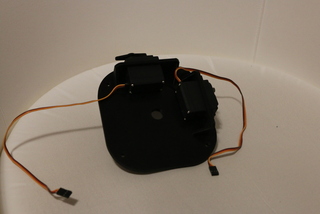
Dopo aver ricercato tra varie opzioni, ho deciso di prendere spunto da questo video di Mr. Volt per progettare il movimento di Wheatley. A differenza del vecchio Wheatley, che usava un meccanismo stile pan & tilt, ho voluto optare per l’idea di sfruttare un giunto universale che fa da perno, e delle “sbarrette” (per il momento costituite da graffette piegate…) per trasferire il movimento dai servomotori all’occhio.
(VIDEO)
Per questo ho acquistato un giunto universale da Amazon, e ho modellato in 3D le piattaforme su cui poggiano i servomotori.
CAPITOLO IN COSTRUZIONE
Lista dei componenti non stampati
- Servomotori
- 3x SG90 per le palpebre e l’iride
- 2x MG996R per il movimento dell’occhio
- Raspberry Pi 3B+
- PCA9685 16-Channel Servo Driver, per controllare tutti i servo
- Portapile per 4 batteria AA, che alimentano i servo
- Una piccola cassa per l’audio, collegata tramite jack 3.5 al raspberry
- Powerbank per alimentare il raspberry
- Controller PS3 per comandare Wheatley
- Giunto universale 8x8 mm
- Led blu e filo di rame per l’occhio
- Alcune viti e piccole componenti prese da un set Meccano